AIじゃんけんのロボット誕生秘話!AIとメカの融合
........
- 更新日
- 2025.09.22
- 公開日
- 2025.03.11

当社は、タカハ機工株式会社が主催する「第11回タカハソレノイドコンテスト(ソレコン)」に、「AIロボットじゃんけん」を出品しました。本記事では、コンテストの結果や作品の製作経緯についてご紹介します。
1. AIじゃんけん、ロボットハンドで進化!
皆さん、当社の「AIじゃんけん」を覚えていますか?AIじゃんけんは、カメラに映った人の手をグー・チョキ・パーのいずれかとして識別し、画面上のキャラクターとじゃんけんができるというものです。過去にはフードロス支援に活用した実績もあります。詳しくはこちらの記事をご覧ください。
生成AIは敵か味方か、ChatGPTと協働開発!

AIじゃんけんについてはこちら!

【お客様事例】フードロスを「AIじゃんけん」でご支援
フードロス支援についてはこちら!
今回はさらに、視覚的・体験的に面白くするために、AIじゃんけんにロボットハンドを追加することにしました。画面上のキャラクターとじゃんけんをするのではなく、実際に動く手を組み合わせることで、よりリアルなじゃんけん体験ができると考えたからです。

-
私たちはロボットハンドの仕組みとして、ソレノイドが活用できると考えました。さらに、ちょうど「ソレノイドコンテスト(ソレコン)」が開催されることを知り、これに応募する形でロボットハンドの開発を進めることにしました。
-

【工場見学レポ】タカハ機工のものづくり力を支える、快適な職場環境とソレノイド技術
ソレノイドやソレコンについてはこちら!
これまで画面上のキャラクターと対戦していた「AIじゃんけん」は、実際にロボットハンドが動く「AIロボットじゃんけん」へと進化していくことになります。
2. ソレコンに挑戦!AIロボットじゃんけんの評価は?
ロボットハンドの構造や技術的な詳細については、次の章で説明します。その前に、AIロボットじゃんけんがソレコンでどう評価されたのかをご紹介します。
果たして、AIロボットじゃんけんはどのような評価を受けるのか...?
期待と不安を抱えながら、私たちは結果発表の日を待ちました。
そして迎えた結果発表の日――
AIロボットじゃんけんは「いいね!賞」を受賞しました!この作品は、対戦相手のじゃんけんパターンを学習し、対戦を重ねるたびにAIが強くなるというユニークな機能を備えています。この特徴が審査員に強い印象を与え、受賞の要因となりました。

ソレコンに応募した動画はこちらです!
3. ロボットハンドの作成
3-1. 3Dプリンタでロボットハンドを出力
ロボットハンドを作るにあたり、最初に考えたのは「どうすれば本物の手のように素早くじゃんけんができるか?」ということでした。じゃんけんで「後出し」と思われないよう、グー・チョキ・パーを素早く切り替えるスピードが重要になります。そこで、ソレノイドという高速駆動が可能なアクチュエータ(エネルギーを動作に変換する装置)を使用し、指に通した糸を引っ張るような構造で設計することにしました。
まずはロボットハンドを3D CADで設計し、3Dプリンタで出力して組み立てを行いました。
糸を引っ張る機構部分は、レーザーカッターでアクリル板を加工して作成しました。シーソーのような機構で、1個のソレノイドで2本の糸を交互に引くイメージです。
試作を作る時間が無く、ほとんどの機材が初めて使うものばかりで苦労しました。大きな失敗や事故もなく、ソレコンまでに完成したのは奇跡です。
3-2. ソレノイドを駆動させるための回路設計
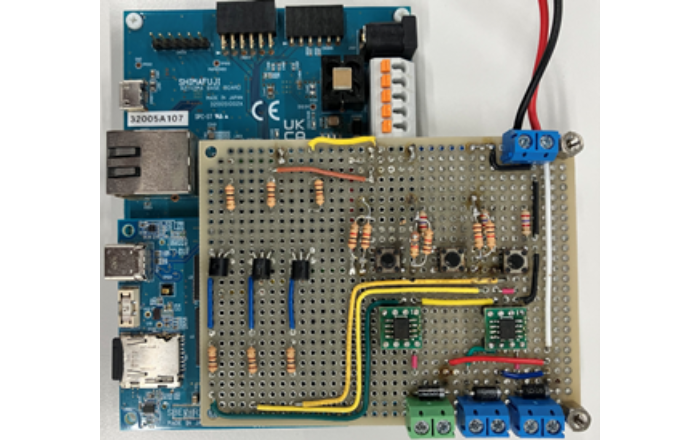
ロボットハンドを動かすためには、ソレノイドを駆動させるための回路が必要です。初めは、市販のタカハ機工製のマルチコントローラを使用していました。このコントローラを使うことでソレノイドを容易に制御できるため、コンテスト応募時も使用していました。
しかし、コンテスト後に展示会への出展機会が増えるにつれ、設置のたびに配線する手間が発生しました。そこで、マイコンボードに直接接続できる専用基板を作成し、よりシンプルな構成に改良しました。
3-3. AIじゃんけん × ロボットハンドの結合
次はいよいよAIじゃんけんとロボットハンドの結合です!実際に動作テストをしてみると...思ったよりもキビキビ動く!ソレノイドのスムーズな駆動により、じゃんけんの手の形を再現できました。
今回の結合は想定していたよりもスムーズに進み、特に苦労することなく完了しました。ハンドの作成段階で何度も試行錯誤を繰り返したことで、スムーズに結合できたと考えられます。
4. AIロボットじゃんけん開発でぶつかった壁と解決策
AIじゃんけんとロボットハンドの結合を実現できました。しかし、AIロボットじゃんけんは開発当初から様々な課題に直面していました。本章では、実際にぶつかった課題を紹介し、その解決の方向性やノウハウを共有します。
4-1. AIを活用して、より新しい体験を提供したい!

「AIを活用してじゃんけんをさらに面白くしたい!」
そう考えたものの、単にカメラで手を認識させるだけでは新しさが足りない...。アイデアを模索し、「AIが学習することで、対戦するたびに強くなるじゃんけん」という方向性にたどり着きました。
例えば、以下のような機能が考えられます。
- 手の形をAIがリアルタイムで認識し、スムーズにじゃんけんを成立させる。
- 相手の出す手を学習し、戦略的に「強くなるAI」を実現する。
これにより、単なるじゃんけんロボットではなく、プレイヤーと一緒に成長するじゃんけんを目指しました。
4-2. どれくらいの精度・速度で認識できるのか?
AI画像認識の精度は、モデルのアーキテクチャやハードウェアの性能に大きく依存します。特に「後出し感のないスムーズなじゃんけん」を実現するためには、以下のポイントが重要でした。
- 高精度な画像認識をしつつ、処理速度が遅れないこと。
- エッジデバイスでリアルタイム処理が可能な構成を選ぶこと。
実験を重ねた結果、ハードウェアとAIモデルの最適な組み合わせを見つけることが鍵であると分かりました。
4-3. MCU/MPU/GPU... どのレベルのハードウェアが必要?
エッジAIの実装には、GPUやAI専用チップの選定が課題となりました。開発当初は、「なぜこれらが必要なのか?」を十分に理解できていませんでしたが、試行錯誤を経て以下のポイントが明らかになりました。
- MCU(マイコン)では処理が間に合わないが、MPU(プロセッサ)なら実行可能か?
- GPUを搭載すると、どの程度の性能向上が見込めるのか?
検討の結果、ルネサスエレクトロニクスのRZ/V2MA(MPU)を採用することにしました。当初は、同シリーズのRZ/V2Lも候補に挙がりましたが、リアルタイム性を重視する今回の用途では、やや処理性能が不足していました。より安定したリアルタイム処理を実現するために、上位モデルのRZ/V2MAを選定しました。実際に動かしてみたところ、違和感のないスムーズな動作を確認できたため、採用に至りました。
4-4. AIモデルの作成・学習データの収集はどうやるのか?
世の中には無料で利用できるAIモデルが多く存在します。しかし、今回のプロジェクトでは「グー・チョキ・パー」を認識する独自のAIモデルを作成する必要がありました。そこで、これらの悩みに直面しました。
- どのようにデータを集めるのか?
- 学習用データの前処理はどうするのか?
- モデルをどうやってトレーニングし、精度を向上させるのか?
手探り状態からスタートし、試行錯誤を繰り返して蓄積したノウハウを資料にまとめました。ぜひご覧ください。
\\ 独自のAIモデルを作成するには? //

5. まとめ
本プロジェクトでは、ハードウェア(ロボットハンド)とAI(画像認識)の統合により、より直感的なじゃんけん体験を目指しました。その結果、展示会で多くの方々と交流を深めることができました。特に、子供たちが楽しみながらAIとじゃんけんをする姿は、技術をより身近に感じてもらう良いきっかけとなりました。さらに、タカハ機工主催のソレノイドコンテストで「いいね!賞」を受賞し、その後の工場見学につながったことも、大きな成果です。こうした経験を通じて、モノづくりの持つ無限の可能性を再認識できました。今後も、新しい技術領域の探求に挑戦し続け、さらなる発展を目指していきます。
また、今回のプロジェクトで得た知見を活かし、エッジAIを活用したソリューション開発のご支援も可能です。
「エッジAIを活用して◯◯を実現したい」
「エッジAIの活用について相談してみたい」
このようなご相談がありましたら、ぜひお気軽にお問い合わせください!
(執筆者:齋藤 智弘、橋本 裕太、藤田 慎之介、編集者:内田 将之)



