産業用ロボットをIOWN® APN上で遠隔制御するシステムの実証実験に成功
........
- 更新日
- 公開日
- 2026.05.19

日本社会では、急速な人口減少を背景に、製造業を中心とした現場で深刻な人手不足が続いています。
製造業では、ロボット導入による省力化・自動化が進む一方で、中小企業においては導入コストの高さや専門知識の不足が障壁となり、ロボット導入の環境整備が十分に進んでいないのが現状です。
この背景には、主に次の3つの課題があります。
・工場システムで用いられる産業用ロボットは、機器と動作制御機能が一体となっており、機器費用が高額になる
・ロボットメーカごとに動作制御機能が独自実装されているため、導入のたびに個別のシステム構築が必要になる
・異なるメーカ間で動作制御機能の互換性が低く、機器の選択肢が限られる
リョーサン菱洋はNTTと、こうしたロボットによる省力化・自動化を求める現場が直面する課題の解決と、現場に新たな価値を提供するという共有の目的を掲げ、共同の実証実験に取り組みました。
1.実証実験の概要
本実証実験では、実際に市場で活用されているFranka Robotics社およびDobot Robotics 社の産業用ロボットを用いて、共通フレームワークの有効性を検証しました。実験で用いた構成を下図に示します。IOWN® APN(All-Photonics Network)※1で接続された横須賀と武蔵野にそれぞれ産業用ロボットとサーバを設置し、遠隔ロボット制御を実現しました。
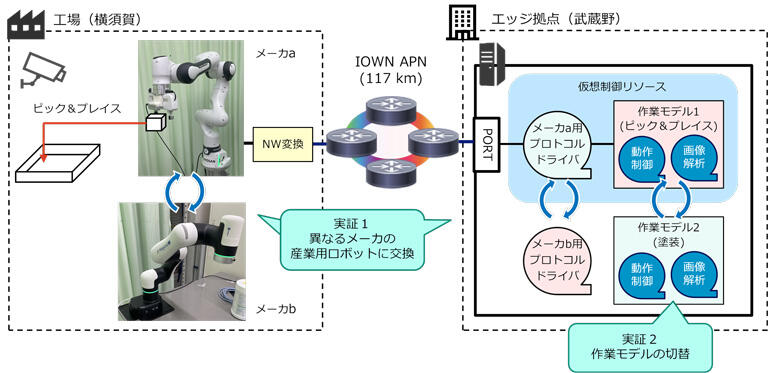
共通フレームワークの特徴は以下2点になります。
① エッジ拠点のサーバ内にプロトコルドライバを事前登録し、プロトコルドライバの変更で、同一の作業モデルを異なる産業用ロボットに対して適用可能とする仕組み
② エッジ拠点のサーバ内に作業モデルを事前登録し、産業用ロボットを動かす前の動作定義において、作業モデルを活用可能とする仕組み
2.リョーサン菱洋、NTT各社の役割
リョーサン菱洋は、市場で広く活用されているロボットの提供に加え、ロボットシステムを設計・実装できる技術力を有しています。一方、NTTは、産業用ネットワーク機能ソフト化※2技術や、IOWN® APN を活用した拠点間ネットワークの提供に強みを持っています。両社がそれぞれの強みを掛け合わせ、以下の役割分担のもと、共同で実証実験に取り組みました。
- NTT:産業用ネットワークの機能ソフト化技術の実装、横須賀と武蔵野を接続するIOWN® APNによる拠点間ネットワークの提供
- リョーサン菱洋:産業用ロボットの提供、ロボット動作の実装、ならびに該当システムの設計・実装


3.実証実験の結果
本実証実験の結果、検証対象とした以下の3点について実現に向けた可能性が確認できました。
- 作業モデルやプロトコルドライバをサーバ上に事前登録することで、作業内容の変更や異なるメーカのロボットへの切り替えでも、現地での動作定義(軌道・速度・ハンドリング条件など)やデプロイが不要になることを確認
- 例えば、中小規模工場においてコンベア付きの簡易ロボットシステム1台分を新規導入する場合、従来は専門のエンジニアが現地で動作定義・デプロイを行う必要があり、通常約6~7カ月を要していた構築工数を、最短で約4.5カ月まで短縮(約30%削減)できる可能性を確認
- 現場作業者は、作業モデル(パレタイズ、ねじ締めなど)を選択するだけで操作・運用開始が可能。専門知識がなくても直感的に操作ができるため、ロボットの動作定義にかかる時間を大幅に短縮できる可能性
4.本実験での技術ポイント
- 産業用ネットワークの機能ソフト化技術
従来、産業用ロボットに隣接して専用機能として実装されていたロボットの制御を行う制御機能および制御機能とロボット間のプロトコルドライバを、独立したレイヤとして定義してソフトウェア実装する技術です。これにより、ロボットと制御機能を分離し、プロトコルドライバの入れ替えだけで、同一の制御機能を異なるメーカの産業用ロボットへ適用できます。
- ROS2ベースの共通フレームワーク(マルチベンダ化)
ロボットの種類やメーカに依存せず制御可能なオープンソースのROS 2をベースに共通フレームワークを開発しました。産業用ロボットメーカごとに専用プログラムを作成する手間を省き、メーカに依存せず、異なるロボットが混在する環境でも統一的な操作を実現します。
- 作業モデル化と選択
ロボットに実行させたい作業を、作業モデルとしてテンプレート化しました。現場作業者は、作業モデル(例:バラ積みピッキング、パレタイズ、ねじ締めなど)を選択するだけで操作・運用可能となり、専門知識を持たない現場作業者でも直感的に操作でき、ロボットの動作定義にかかる時間を大幅に短縮します。
- ロボット制御のサーバ集約
制御機能をサーバ上に集約することで、複数のロボットを一元的に制御・管理することが可能です。これによりソフトウェアによる柔軟な構成変更、ハードウェアコストの最適化に加え、システム全体の複雑性を低減し、運用効率が向上します。
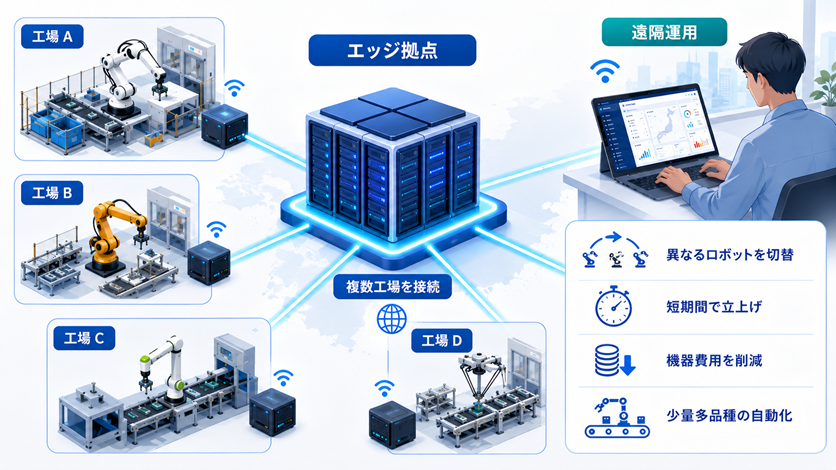
5.考案したサービスモデル
本実証で有効性を確認した共通フレームワークをネットワーク越しのエッジ拠点のサーバ上に実装することで、工場ごとのロボット制御を柔軟かつ効率的に運用できるモデルを考案しました。このモデルでは、エンジニアが現場に常駐することなくオンライン上で、メーカの異なる産業用ロボットを容易に選定・切り替えできるほか、新しい作業への対応を短期間で実装可能です。
また、制御機構をエッジ拠点に集約し複数の工場をネットワークでつなぐことで、一括でシステムの構築・変更が可能になるとともに、機器費用の削減効果も期待できます。
これらにより、ロボット導入のハードルを緩和し、今まで自動化が進められなかった少量多品種の製造を行なっている中小規模の工場においても、生産ラインの自動化が可能となります。
6.まとめ
リョーサン菱洋はNTTと連携し、産業用ロボットの遠隔制御を必要とする様々なユースケースでの活用に対して積極的に取り組んでいきます。製造業をはじめ、食品・化粧品産業などの生産ライン自動化を通じ、人手不足といった課題解決に貢献してまいります。
今後も、これらの技術を組み合わせることで、中小企業をはじめとした工場におけるロボット導入の負担を軽減し、よりスムーズな導入を支援するための実証や提案を継続してまいります。
(執筆者:中島 朗、編集者:安田 朋史)
■ 解説
*1 IOWN® APN(All-Photonics Network)
IOWN Global Forumにてオープンにアーキテクチャ策定が行われているフォトニクス技術をベースとした革新的ネットワークです。フォトニクス(光)ベースの技術の適用範囲を拡大することで、現在のエレクトロニクス(電子)ベースでは困難な、低消費電力、高品質・大容量、低遅延の伝送を実現します。
- 【詳細】 IOWN | NTTグループの取組み

「IOWN®」は、NTT株式会社の商標又は登録商標です。
*2 産業用ネットワークの機能ソフト化技術
従来、産業用ロボットに隣接して専用機能として実装されていた、ロボットの制御を行う制御機能および制御機能とロボット間のプロトコルドライバを、独立したレイヤとして定義してソフトウェア実装するNTTによる技術です。