エッジAIだけでは足りない? フィジカルAI実装に必要な「3つのコンピュータ」
........
- 更新日
- 公開日
- 2026.05.25

近年、フィジカルAIは大きな注目を集めていますが、期待の高まりとともに、導入や開発の難しさも明らかになってきました。複数のセンサやカメラからのデータをリアルタイムで処理したいものの、処理負荷やレイテンシがボトルネックとなるケースは少なくありません。また、フィジカルAIや生成AIをローカル環境でどのように実装すべきか分からず、検討が進まないままプロジェクトが停滞してしまうといった課題も現場の悩みとして多く挙げられています。こうした状況を踏まえ、ロボット×AI分野における市場変化を背景に、エッジデバイス、学習環境、シミュレーション環境を組み合わせた開発アプローチが示されました。本記事では、その内容をもとに、フィジカルAIを検討・導入する際に押さえておきたい考え方を整理します。
INDEX
1. ロボットは「教えた通りに動く」から「状況に応じて振る舞う」へ
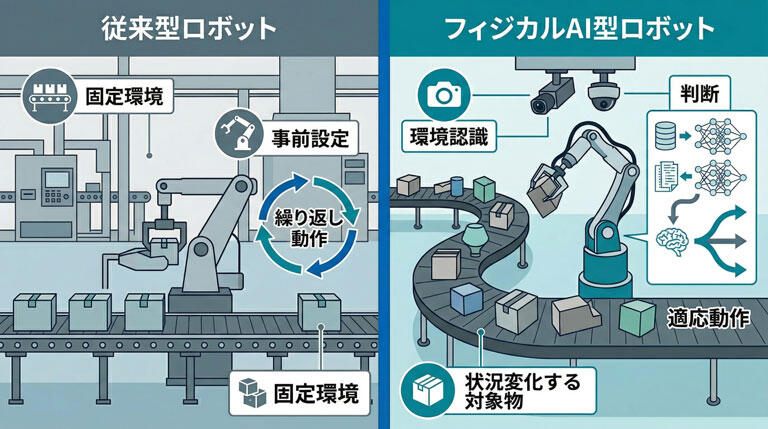
従来の産業用ロボットは、いわゆるティーチングと再生によって、あらかじめ決められた位置や手順を正確に繰り返すことを得意としてきました。こうした方式は、環境が安定している現場では高い効果を発揮しますが、対象物の位置ずれや周辺状況の変化が生じる現場では、柔軟な対応に限界があります。そこで近年注目されているのが、視覚・言語・行動を統合し、未知の状況においても判断しながら動作できるフィジカルAIです。Vision-Language-Action(VLA)モデルをはじめ、強化学習や模倣学習といった手法は、これからのロボット開発において不可欠な要素となりつつあります。これは単なるロボットの高機能化にとどまらず、開発プロセスや設計思想そのものが変化することを意味しています。こうした技術的な変化は、製造現場や物流現場にとっても無関係ではありません。人手不足の深刻化や、変種変量生産への対応が求められるなか、「あらかじめ決め打ちした自動化」だけでは対応しきれない場面が増えているためです。フィジカルAIが注目を集める背景には、AI技術の進歩だけでなく、現場側の要求水準が高度化しているという現実があります。
2. フィジカルAIに、なぜ「3つのコンピュータ」が必要か?
重要なポイントは、フィジカルAIを推進するうえで 3つのコンピュータ環境が必要になる点です。1つ目は、現場でリアルタイム推論を担うエッジデバイス。2つ目は、ベースモデルの構築や追加学習を行うためのモデル学習用コンピュータ。そして3つ目が、デジタルツイン上で動作検証や試行錯誤を行うためのシミュレーション用コンピュータです。この考え方は、ロボットAI開発を「高性能な機器1台で完結するもの」と捉えてしまう誤解を防ぐうえで重要になります。実際には、現場で必要となる推論性能だけでなく、学習に要する計算資源や、実機を使わずに安全かつ効率的に検証を行うための仮想環境が不可欠です。特にフィジカルAIのように、試行回数の多さが成果に直結する分野では、現実世界だけで学習や検証を進めることは、時間・コスト・安全面のいずれの観点からも難しくなります。
そのためフィジカルAIの実装においては、実機試験のみに頼るのではなく、シミュレーション環境を活用した事前学習や検証が重要だと考えられます。「3つのコンピュータ」という考え方は、こうした現実的な開発プロセスを体系的に捉えたものだと言えるでしょう。推論・学習・シミュレーションといった役割ごとに、必要となる性能のコンピュータを切り分けて準備することが、最初の設計ポイントになります。

3. エッジデバイスに求められるのは、性能だけではない
重要なのは、スペックを並べることではなく、「なぜその性能が求められるのか」という視点です。フィジカルAIでは、画像データに加えて、言語情報、各種センサの入力、動作指令など、複数の情報を同時に扱う場面が増えていきます。さらに現場では、複数のセンサやカメラから得られるデータをリアルタイムに処理したい一方で、処理負荷やレイテンシが大きな課題となります。そのため、クラウドに依存せず、エッジ側で即座に判断を返すことが求められるケースも少なくありません。つまり、エッジデバイスの選定においては、単純な演算性能の高さだけを見ても十分とは言えません。どの種類のデータを扱い、どの程度の遅延まで許容できるのか、処理のどこまでをローカルで完結させたいのか。また、学習済みモデルを載せて推論するだけなのか、現場での運用を通じて推論の改良サイクルまで回したいのか。こうした要件を整理したうえで、必要な性能や周辺構成を検討していくことが重要になります。
4. 「実装できる」ことより「開発の流れを作れる」こと
フィジカルAI開発において重要になるのは、「高性能なAIを載せられるかどうか」ではなく、データ収集・学習・デプロイのサイクルをどれだけ短く、安定して回せるかという点です。フィジカルAIは、最初から完成形を想定して作り込むよりも、試行錯誤を重ねながら段階的に改善していく開発スタイルに適しています。そのためには、実機検証だけに頼らず、学習環境や場合によってはシミュレーション環境も含めた、開発全体のワークフローをあらかじめ設計しておくことが欠かせません。例えば、ロボットに物体操作を学習させる場合でも、人が細かな動作をすべてコードで指定するのではなく、遠隔操作や模倣によってデータを集め、モデルを調整し、エッジ側で自律推論させる、という流れが現実的になります。
このようなアプローチでは、学習と検証を何度も回すことが前提となるため、「学習はどこで行うのか」「推論はどこまでを現場で完結させるのか」といった切り分けが重要になります。現場で検討を進める際には、「どのロボットを使うか」「どのデバイスを載せるか」といった機器選定だけでなく、「データをどう集めるか」「学習と検証のサイクルをどう設計するか」「どこまでを現場で再学習・再調整したいのか」といった観点まで含めて考える必要があります。ここを整理せずにPoCを始めてしまうと検証が単発で終わり、その後の展開につながりにくくなります。ロボット×AIの取り組みでは、機器選定より先に開発サイクルそのものを描いておくことが、実務的な第一歩になります。
5. まとめ | Jetson Thorという選択肢
こうした前提を踏まえたうえで、エッジ側の中核として選択肢に挙がるのが NVIDIA Jetson Thor™ です。Blackwellアーキテクチャを採用し、高いAI推論性能を備えることで、画像・言語・センサ情報を扱うマルチモーダルAIをエッジ環境で実装しやすい構成となっています。大容量メモリや高速ネットワークにも対応しており、ロボティクス用途やリアルタイム推論を前提としたフィジカルAI開発に適したデバイスとして位置づけることができます。
フィジカルAI時代のロボット開発は、「高性能なエッジデバイスを選べば解決する」という単純な話ではありません。重要なのは、現場で推論を担うエッジ、モデルを育てる学習環境、そして安全かつ高速に試行錯誤できるシミュレーション環境を組み合わせた、開発全体の設計です。近年、「ロボットにAIを載せたい」という声は増えていますが、実装が思うように進まないケースも少なくありません。その多くは、性能不足というよりも、開発の前提や進め方が十分に整理されていないことに起因しています。だからこそ、最初の一歩として重要なのは、「現場で何を自律化したいのか」を明確にし、その実現に必要な処理・学習・検証の役割分担を整理することです。フィジカルAIの実装を前に進める鍵は、個々の技術を比較することよりも、ワークフロー全体をどう設計するかにあると言えるでしょう。
(編集者:xx xx)