AgiBotの取り組みから見えた!人型ロボット×AIの市場動向
........
- 更新日
- 公開日
- 2025.12.16

製造現場の自動化は進化を続けてきましたが、従来型ロボットでは「完全な自動化」には届いていません。人手不足や高齢化、段替えや多品種対応といった課題は、依然として現場に重くのしかかっています。こうした課題を打破する次の一手として注目されるのが、人型ロボット(ヒューマノイドロボット)です。過去に普及しなかった理由は「脳みそ」、つまり推論能力の欠如でした。しかし今、AIによる視覚と言語の統合推論がその壁を破ろうとしています。
INDEX
1. 人型ロボットが有用な理由
従来のロボットは、ロボットの形状に合わせた作業方法のティーチングが前提でした。固定化された動線・姿勢・把持角度を高精度に再現する一方で、現場での「ちょっとしたズレ」や「例外処理」には弱くなります。段替えや多品種への対応には、追加ティーチングや治具変更、検査フローの再設計などの負担が積み上がります。人型であることの利点は、作業者の身体動作を直接模倣できる点にあります。たとえば、棚から部品を取り、姿勢を切り替え、微妙な抵抗を感じながらねじ締めを行うような一連の動きは、腕・手・体幹の協調制御が前提です。人型ロボットは、人の動作そのものを学習し、現場での同等タスクへ代替できる可能性を持ちます。ここで鍵となるのがAIです。AIは、模倣の一環として、現場状態に合わせた最適化・調整を自動で行うことを可能にします。ティーチングの「網羅・固定」から、柔軟な振る舞いへの進化が、人型×AIの価値となります。
2. AIがロボットに“考える力”を与える
これまで人型ロボットの普及を妨げていた最大の壁は「頭脳」、つまり状況を理解し、適切な行動を選択するための推論能力でした。この壁を突破するカギとなるのが、エンボディドAIと、それを支えるVLM(Vision-Language Model)およびVLA(Vision-Language-Action)です。
エンボディドAIは、AIが物理的な「身体」を持ち、現実世界と直接やり取りしながら学習・行動する仕組みを指します。これにより、ロボットは単なるプログラム実行ではなく、環境に応じて柔軟に判断し、動作を最適化できます。VLMは、画像や動画などの視覚情報と、指示やラベルなどの言語情報を組み合わせて理解します。例えば、「棚Aの左列から型番Bを取り、ラインCへ配膳する」という複雑な指示を構造化できます。VLAは、その理解をもとに、接近・把持・挿入・ねじ締め・検証・後処理といった具体的な動作に変換します。さらに、光の反射や部品位置のズレなど、現場特有のノイズに合わせて動作を微調整します。
この「理解→計画→行動」の一貫した流れは、まさにエンボディドAIの本質であり、非定型作業を含む工程での成功率を大きく高めます。これにより、PoC止まりを超えて、実際の稼働へ進める原動力となっています。
3. ロボットにおける「手」の重要性
ロボットの進化において、「頭脳」と並んで重要なのが「手」です。人間の手は、把持・操作・微細な調整といった高度な機能を備え、私たちの生活や産業活動を支えています。同様に、ロボットが現場で実用化されるためには、単に物を持つだけでなく、多様な形状・材質・重量に対応できる柔軟性と精密さが求められます。
なぜ「手」が難しいのか?
従来のロボットハンドは、決められた形状や位置にある部品を扱うことは得意でした。しかし、現場では部品の位置ズレ、光の反射、摩擦の変化など、予測不能な要素が多く存在します。これらに対応するためには、単なる機械的な動作ではなく、状況を理解し、動作を適応させる知能が必要です。
4. 中国の新星「AgiBot」の取り組み
そんな中、ロボットの手に関する技術開発に力を入れているのがAgiBotです。
AgiBotは2023年2月に上海で設立された、人型ロボットを開発する新興企業です。 わずか2年足らずで急成長を遂げ、2024年8月には量産機を発表、2025年1月までに1000台の納品実績を達成しました。
ロボットの手の開発への注力
AgiBotは、手に関する技術の開発に力を入れており、全て自社で設計・生産を行っています。従来の作業者の工程をロボットに置き換える際、手の性能は極めて重要です。他の人型ロボットのメーカでは歩行はできても、手に関する開発が疎かになっている企業も見受けられますが、AgiBotはこの点に徹底的に取り組んでいます。
AgiBotの競争力は「垂直統合」
AgiBotの最大の強みは、ハード・ソフト・データ・製造を垂直統合していることです。多くのロボットベンダは、モジュールの外部調達やアルゴリズムの外部依存、量産の委託によって、連携コストや同期遅延に悩まされています。一方、AgiBotは意思決定から量産までのプロセスを自社内で完結できるため、開発サイクルを圧倒的に短縮できます。
結果として、試作→評価→設計変更→試作のサイクルが高速化し、現場導入に必要な「条件出し」や「データ収集・モデル更新」を、現物の制約を踏まえたまま反復できます。
世界中に多数の人型のロボット企業が存在しますが、ハードウェア・ソフトウェア・AIの全てを開発できる能力を持つ企業は、現在テスラとAgiBotの2社しかありません。
全てを自社で開発することで、ハードウェアとソフトウェアを緊密に紐付けることができ、商業化やビジネス化を早期に進め、生産ラインやサービス業界への導入を容易にしています。
ヒューマノイドロボット採用事例
AgiBotは複数のロボットモデルをラインナップしています。
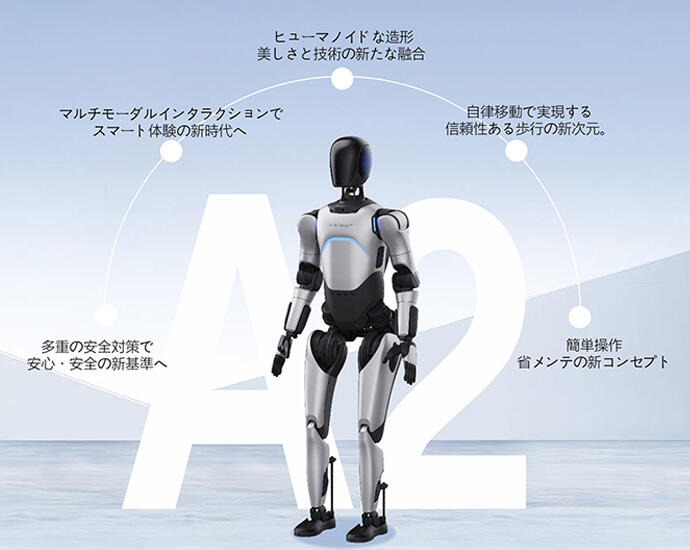
2足歩行のA2ロボットは、歩いたり走ったりすることができ、VLMモデルを搭載して会話や案内も可能です。店舗、カーディーラ、ショールーム、展示会などで案内役として多数導入されています。
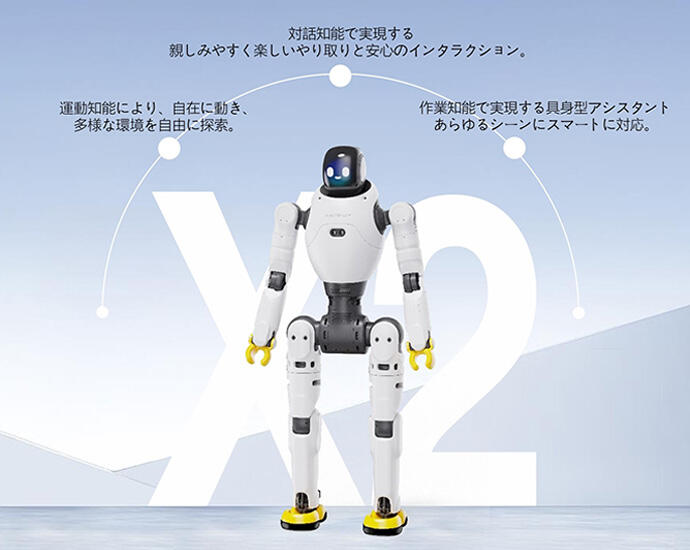
2足歩行のX2ロボットは、可愛らしいデザインで若年層やイベント参加者に人気があり、老人ホームなどからの問い合わせも多く、会話や簡単な動作(薬のピックアップなど)が可能です。

G1ロボットは、G2 Studioというプラットフォームと組み合わせて使用されます。このプラットフォームは、データ収集、データ処理、データトレーニング、実行までの一連の流れを処理できるソフトウェアです。産業、商業、家庭など様々なシーンで活用されています。
出典:AgiBot「ロボット×AIの市場動向」ウェビナ登壇資料より引用
国際ロボット展での様子
12月3日から開催された国際ロボット展では、AgiBotのヒューマノイドが滑らかな動きを披露しました。
-
踊る AgiBot X2
-
AgiBot スキルハンドシリーズ
5. AgiBotが提供するソリューション
統合プラットフォームの提供
AgiBotは、主にソフトウェアプラットフォームをお客様に提供しています。このプラットフォームには、ハードウェア(エンドエフェクタやロボット本体)、モーションプランニング、モーションキャプチャ(VRやリモコン、モーションキャプチャースーツなど)が一式で含まれています。データ収集を0から始めると大きなボリュームが必要となりますが、AgiBotは既に2024年に上海に世界最大級のデータセンタを立ち上げました。
オープンソースとしてのデータ公開
2025年3月の 一般市場に向けた正式リリースでは、100万回分の学習データをオープンソースとして公開しました。それ以降も、200万回、そして2025年11月時点では300万回の学習データを収集し、基盤モデルのトレーニングを行っています。このオープンソース戦略により、研究者コミュニティ全体の発展を促進し、業界全体を盛り上げることを目指しています。お客様は、AgiBotのソフトウェアプラットフォームと基盤モデル(GO1)を活用し、さらに自社特化型の実機データを収集することで、ファインチューニングモデルを作成できます。
6. 多様な作業シーンへの対応
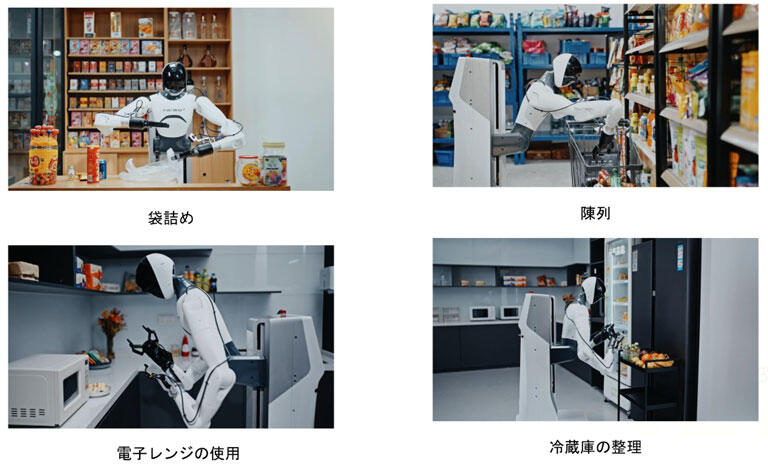
上海のデータセンタで収集したさまざまなデータを活用し、ファインチューニングを実施しています。その結果、コンビニのレジ作業、商品陳列作業、電子レンジや冷蔵庫の使用など、さまざまな作業がすでに可能になっています。これらは単なる実験レベルではなく、実際の業務環境での使用を想定した実践的なタスクです。データ収集に注力することで、基盤モデルの品質が向上し、その後のファインチューニングで少量のデータでも効果が出せるようになっています。
基盤モデルのトレーニングは非常に重要です。どのようなデータを使用し、どのような方式でトレーニングするかが、最終的な性能を大きく左右します。良質な基盤モデルがあれば、その後のファインチューニングで少量のデータでも高い効果を発揮できます。AgiBotがデータ収集とトレーニングに膨大なリソースを投入している理由は、ここにあります。
7. 人型のロボットの将来的な展望
お客様の中には、人型ロボットを「ハードウェア中心の製品」と捉える傾向がまだまだあります。しかし、実際に重要なのはロボットに何をさせるかというソフトウェアです。 特に、特定のドメインやタスクに関するデータ収集とファインチューニングによる追加学習が性能を決定づけます。
日本をはじめとする先進国では、人手不足が深刻で、この課題を解決する次の一手として、人型ロボットは不可欠な技術となるでしょう。AgiBotのように、人型ロボットの実用化を加速させる企業は、この社会課題の解決に大きく貢献します。特に日本市場での活躍が期待されており、今後の展開が注目されています。ハードウェアとソフトウェアを統合開発し、膨大なデータを収集・活用できる企業こそが、この市場をリードしていくでしょう。
(編集者:安田 朋史)