ドップラーセンサの原理 | ドップラーセンサとは - 第2回 -
........
- 更新日
- 2023.09.27
- 公開日
- 2022.03.15

第1回は、ドップラーセンサの前にまず知っておきたい「周波数と電波とは?」について解説しました。
今回は、ドップラーセンサの原理と共に他のセンサとの違いを解説します。まずは前回のおさらいから。
1. 前回のおさらい
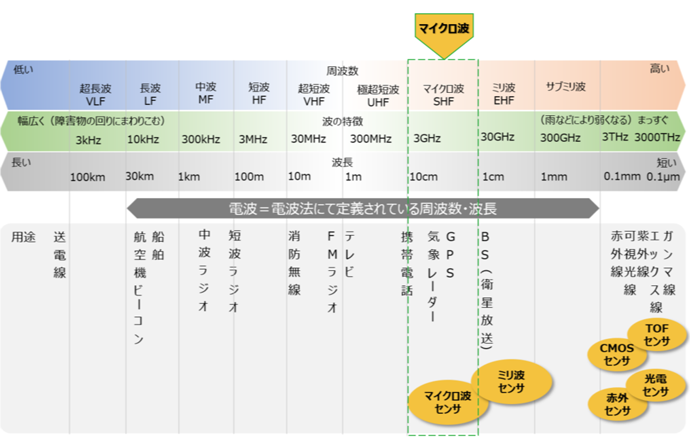
前回の最後でドップラーセンサは電波の中でも「マイクロ波」を使用したものの1つであることをご説明しました。
センサの中でも、自らがマイクロ波を送信して物にぶつけることで、やまびこのように反射して返ってくる電波を感知するものをドップラーセンサと呼びます。
ドップラーセンサの仕組みを活用することで、以下が可能となります。
- 電波の位相差から、物体の移動(接近、離反)を検知できる
- 物体の移動速度の算出ができる
- 複数の周波数を用いると移動している物体までの距離の計測ができる
2. 位相とは?
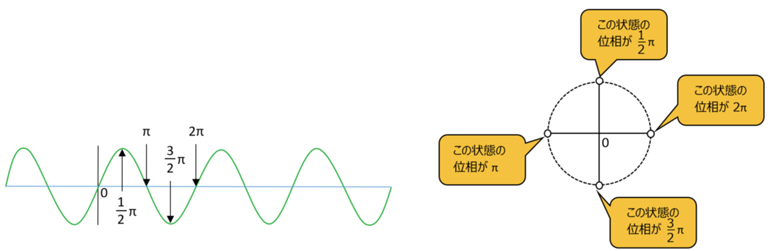
ここでは位相について簡単にご説明します。 位相とは、波の様々な情報を表す物理量の1つで、ある時点での波が、その波の繰り返し周期の中のどの位置(タイミング)にいるかを表します。
位相の根源である円運動で説明しますと、物体が反時計回りに円運動した場合、円を一周すると位相は、物体弧度法で2π(パイ)になります。
(参考:度数法では円の一周を表す角度は360°(度)です)
波の場合も同様で、x軸正の向きに進む正弦波では、波の位相は次のように変化します。

つまり、位相が2π変化した場合、位相0と同じ状態に戻ることになります。
円運動では角速度ω、時間tを使って物体の角度を表すことができます。波も同様ですので、このωtという角度が波の状態(物体の位置)を表す位相となります。
つまり、位相差とは、同一周波数AとBとした場合、これら2つの波の位相の差のことを言います。

3. 物体の移動(接近・離反)検知の仕組み
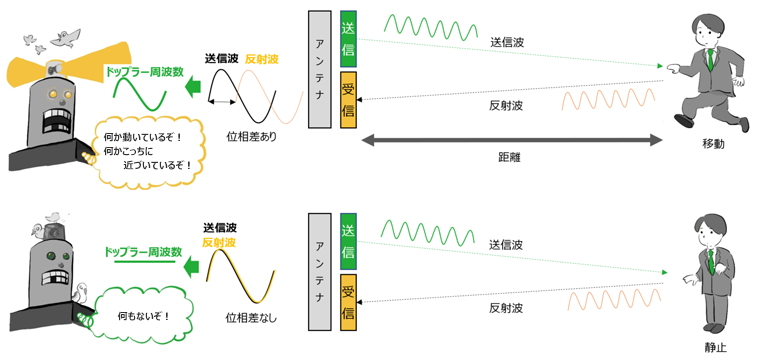
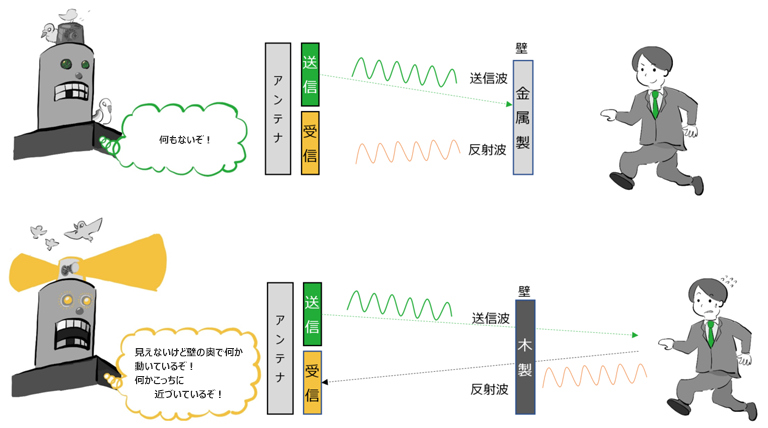
ドップラーセンサからの電波が、移動する物体に反射することを利用し、送信波、反射波で合成されたドップラー信号の有無で物体の存在を検知することが可能です。
この時に、送信した信号と反射してきた信号に位相差が生じ、物体の移動速度に応じた周波数となりますが、これをドップラー周波数と言います。
つまり、このドップラー周波数の信号を検出し、送信時と受信時の位相差を調べることで、物体の接近や離反、物体が動いていることを検知する仕組みです。
ドップラーセンサは、センサに触れることなく計測できることから、非接触センサと呼ばれることもあります。
同様に、超音波、CMOS、光電など触れることなく検出するセンサも非接触センサと言えます。
なお、ドップラーセンサは、「電波」に分類されるミリ波・マイクロ波を利用するため 、電波法のルールに基づいて利用する必要があります。
また、金属や水といった材料や成分に対しては、電波の反射や吸収といった現象があるため、そのような場所・環境は不得意とされていますが、それ以外の材料に対しては、電波が減衰するものの透過する特徴があります。
4. 各種非接触センサとマイクロ波との特徴比較
非接触をキーワードとした他センサとの違いや特徴を整理してみました。まだまだ、比較対象があるかもしれませんが、思いつくところを列記しました。(コスト面は含まれていません)
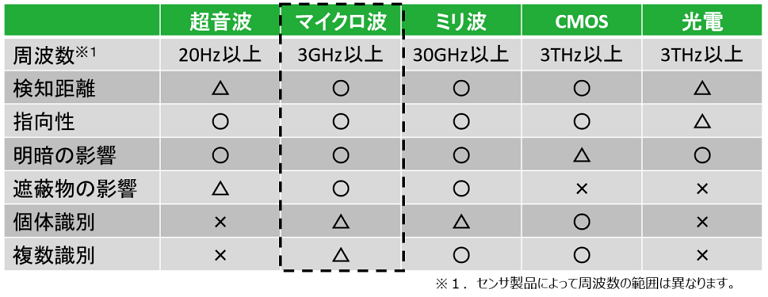
周波数が高くなるほど、たくさんの情報量を伝えることが可能となるので、それぞれに得意・不得意がみえてきました。
こんなイメージを妄想してみました!

高い周波数は直行性があり金属は電波を反射し、水(※)は電波を吸収(減衰)します。マイクロ波はミリ波と比べ、空気中の水分による減衰度合いが低いという特徴があります。
- 水分状態によっては減衰とは別に電波を反射します。
5. まとめ
電波は金属やモノ・ヒトを反射する特徴から人の目に変わるセンサとして活用されており、最近の自動車では、マイクロ波、ミリ波、CMOSを使用した安全・衝突防止機能が搭載されています。これからの普段の生活環境にも浸透されてくるかもしれません。