センサレス制御とは?制御の仕組み・メリット・開発での課題をわかりやすく解説
........
- 更新日
- 2026.01.14
- 公開日
- 2023.10.13
センサレス制御とは、モータの制御に通常必要なセンサ(エンコーダ、ホールセンサなど)を使用せずに、モータの動作監視および制御を行う技術です。センサを使う制御と比べて精度は落ちますが、精度があまり求められない産業分野(ポンプ、冷凍機、送風機、ファンなど)では小型化、低コスト化に向けてモータのセンサレス化がどんどん進んでいます。本記事はセンサレスでの開発ステップ、設計ポイントをご説明します。
-
モータの基礎知識や制御方式を知りたい方はこちらの記事をご覧ください。
-
【記事】図と写真で理解するモータ入門~構造・特性、制御の仕方から実践まで~

INDEX
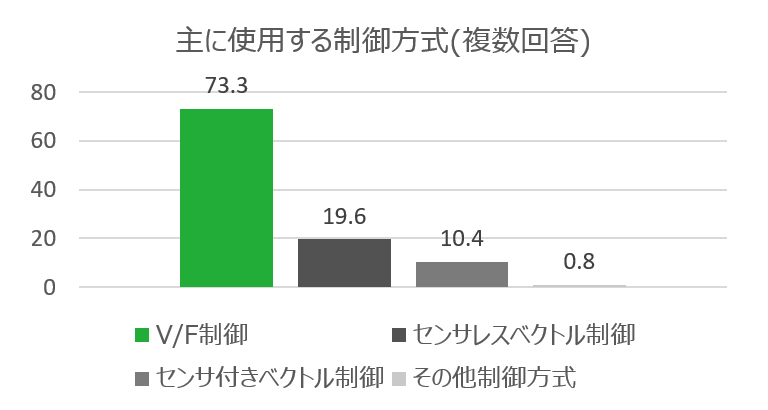
1. モータ・インバータ制御に関するユーザ調査
以下グラフは2022年度のモータ・インバータに関するユーザ調査の結果です。調査結果では、V/F制御※1(フィードバック制御なし)が73.3%と最も高く、続いてセンサレスベクトル制御※2が19.6%となっており、センサ付きベクトル制御※3よりも多く使用されていることが分かります。
医療関連機器や半導体製造装置など、モータの位置が少しずれただけで致命的となるアプリケーションではセンサを使った制御が必須ですが、位置制御が不要で速度や風量のみを制御したい冷凍機や送風機などのアプリケーションにおいてはセンサレス制御が主流となってきています。
ただし、単純にセンサを取り除くだけでは、今までの制御が破綻してしまうため、ハードとソフトの観点でセンサ部分の処理を置き換える工夫が必要です。
※1 V/F制御:電圧と周波数の比率を一定に保つモータ制御方式
※2 センサレスベクトル制御:回転位置センサを使わず、電気的な推定で磁極位置を算出する制御方式
※3 センサ付きベクトル制御:エンコーダなどの位置センサから磁極位置を取得して行う制御方式
2. センサ「あり」と「なし」で何が違うのか?
センサ「あり」と「なし」(センサレス)の比較を以下に纏めています。
| 項目 | センサ | センサレス |
|---|---|---|
| 小型化 | × | ○ |
| コスト低減 | × | ○ |
| 故障リスク低減 | × | ○ |
| 制御精度 | ○ | △ |
| 応答性 | ○ | △ |
| 高度な設計/制御技術 | 不要 | 必要 |
センサレスでは、物理的にセンサがなくなる為、製品の小型化や重量を減らすことに繋がります。センサ自体のコスト削減に加えて、センサ配線やセンサの故障リスクも低減でき、メンテナンスコストの低減にもつながります。一方でセンサ制御と比べて精度が低く、特に低速または停止状態での制御には不向きです。応答性では、制御ループ系の中で位置や速度の推定処理が必要なため、センサ制御より劣ってしまいます。また、センサレス制御のアルゴリズムはとても複雑で、専門的な知識と経験を必要とします。
従って、センサレスを採用する時には、制御精度や応答性を必要としないアプリケーションに限定することでデメリットとして気にする必要がなくなるため、「高度な設計/制御技術」の課題解決に注力することができます。

-
省エネや高効率に活躍するブラシレスモータ※4について知りたい方はこちらの記事もご確認下さい。
※4 ブラシレスモータ:ブラシの代わりに、電流を流す相(コイル)を電子回路で切り替えて回転させるモータ
-

【記事】省エネ、高効率を実現するブラシレスモータの開発課題と解決策
3. 位置センサレスベクトル制御技術
ここで主なセンサレス制御技術をいくつかご紹介します。センサレスでは、モータの電流と電圧から直接的に速度/位置を推定します。低速時や停止状態では精度が落ちてしまいますが、位置センサを必要としないためにシステムが簡素化され、コストを抑えることができます。
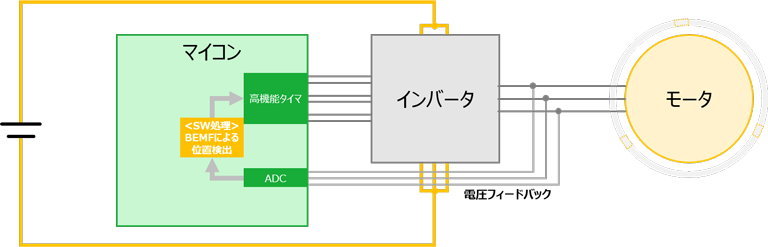
下図はセンサありでのモータ制御の構成になります。比較しながらセンサレス制御の構成をご確認下さい。

三相ブラシレスDCモータ制御
| 電流センサレス制御 |
モータの電流を間接的に推定することで制御します。電流センサを使わないことでコストとサイズを削減できます。
 |
| BEMFベースのセンサレス制御 |
BEMF(逆起電力)ベースのセンサレス制御は、モータの回転によって発生する電圧(BEMF)を利用して、モータの位置や速度を推定します。特にブラシレスDCモータにおいてよく用いられます。モータが回転していないとBEMFを検出できない為、低速域や停止状態での推定は難しいという課題があります。
 |
| オブザーバベースのセンサレス制御 |
オブザーバ(状態推定器)を使用してモータの状態(速度、位置、負荷など)を推定します。高度な数学的アルゴリズムを用いるため、計算負荷は高くなります。オブザーバの一例としては、拡張カルマンフィルタ※5やスライディングモードオブザーバ※6などがあります。
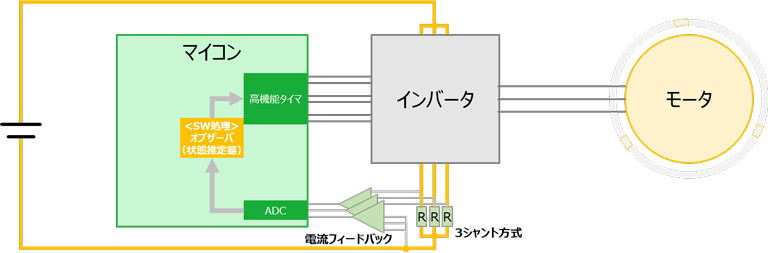 ※5 拡張カルマンフィルタ:非線形システムの状態を推定するフィルタ。センサレス制御で磁極位置推定に用いられる ※6 スライディングモードオブザーバ:信号の変化を利用して、ノイズが多い場面でもモータの状態を安定して推測できる仕組み |
これらのセンサレス制御技術は、それぞれ特長と課題を持っており、用途に適した技術を選ぶことが重要になります。
4. センサレス制御が難しいと言われる理由
一般的なセンサレスでの開発は以下フローで開発を行います。開発を進める前にハードウェア開発、ソフトウェア開発で各々何が課題となるかを事前に把握しておくことが重要になります。

ハードウェア開発での課題
電源ノイズ対策
モータ駆動回路からの電源ノイズは、センサレス測定(モータの状態推定)に影響を及ぼす可能性があります。ノイズフィルタ※7やグラウンドプレーン※8の設計を工夫して、ノイズの影響を最小限に抑える必要があります。
※7 ノイズフィルタ:電気的ノイズを除去して信号を安定させる回路またはアルゴリズム
※8 グラウンドプレーン:基板上に広く敷かれた金属の面で、回路の電流を安定させるための基準となる場所
-
機器から発生するノイズ「EMI」について詳しく知りたい方はこちらの記事をご覧ください。
-

EMIについて- 第1回 - EMIの基礎
ソフトウェア開発での課題
低速~高速まで安定動作が難しい
センサレス制御は、高速域では比較的精度が高いですが、低速域では精度が低下することがあります。これは、低速域では電流と電圧の信号が弱く、ノイズに対して非常に敏感になるためです。低速での信号が弱いことで、モータの状態を正確に推定し適切に制御することが難しくなります。この課題は、モータが低速から高速へと移行する際にも影響を及ぼし、制御の精度と安定性を損なう可能性があります。
センサレス制御の低速領域でのパフォーマンスを向上させるためには、モータのパラメータを正確に知ることが重要です。これらのパラメータを事前に測定し、制御アルゴリズムにフィードバックすることで、低速域での制御精度を向上させることが可能です。
モータパラメータ例
- d軸インダクタンス:Ld
- q軸インダクタンス:Lq
- モータ抵抗:R
- 磁束:φm
停止状態からの静音駆動
停止状態では、モータの電流と電圧から得られる情報が非常に少ないため、モータの実際の位置を正確に推定できず、停止状態から滑らかな静音起動が難しくなります。起動時にモータが振動したり、騒音を発生したりと、アプリケーションのパフォーマンスに悪影響を及ぼす可能性があります。
起動時の制御を改善するためには、初期ロータ位置推定アルゴリズムを適用することが有用です。これらのアルゴリズムは、モータが停止しているときにロータの位置を推定し、起動時の制御を改善します。また、起動時に電流を制限することで、モータの振動や騒音を低減できます。

過負荷による脱調や温度変化への対応
モータが過負荷状態になると、電流と電圧が大きく変動し、指令に追従できず速度・位置がずれてしまう、「脱調」という現象が発生します。この脱調により、モータ状態の推定が難しくなり、安定性が低下する可能性があります。 さらに過負荷状態では、モータが発熱し、モータの抵抗値などのパラメータが変動します。パラメータの変動は、センサレス制御の精度をさらに悪化させます。過負荷状態を適切に管理するために、制御アルゴリズムに過負荷を検出させることが重要です。
検出方法の一つとして挙げられるのは、モータの電流監視です。電流が一定のしきい値を超えた場合、制御システムは過負荷状態と判断し、モータの出力を制限したり、警告を発したりすることが可能となります。
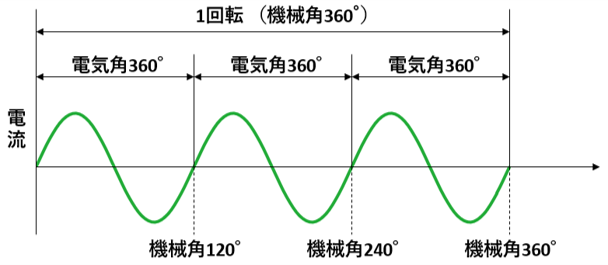
(正弦波の形が理想 しきい値電流を超えない)
センサレスモータは精度を必要としないアプリケーション向けに活用することで、製品の小型化やコスト削減が期待できますが、センサレス制御には知識と技術が必要になるため、内製開発を進めることが難しい場合も出てきます。特にソフトウェア制御は多くの知見が必要となるため、専門的な教育やトレーニング、専門家の助けを得る選択も重要になってきます。
5. ワンランク上のモータドライブ モータソリューションのご紹介
弊社では複雑なモータ制御のお困りごとに対するサポートを行っています。最先端のモータ制御技術を保有するプロ集団である青山モータードライブテクノロジー社と連携し、複雑な制御である位置センサレス制御や電流センサレス技術など、高性能かつ低コスト実現に向けご協力が可能です。ハードウェア(回路設計)からソフトウェア(プログラミング)まで、パワーエレクトロニクスのトータルソリューションを皆さまにご提供致します。センサレス化に興味がある方や既にセンサレス導入後の更なるコスト低減や高性能化等のお困り事をお持ちの方は是非、ご相談下さい。