図と写真で理解するモータ入門~構造・特性、制御の仕方から実践まで~
........
- 更新日
- 2025.07.31
- 公開日
- 2025.04.28
本記事では、これからモータを使った製品開発を始める方や、ブラシ付きモータからブラシレスDCモータへの切り替えを検討中の方に向け、前半ではモータの基礎知識や制御方式について説明し、後半では評価ボードを使用してモータのチューニングから回転までを解説します。
INDEX
※動画で概要を知りたい方はこちらから!
\\モータ制御の基礎から評価ポイントまで 動画でもご覧いただけます!//
1. モータとは
モータとは電気エネルギーを力学的エネルギーに変換する電動機のことで、世界の電力消費量のうち約50%がモータで消費されており、私たちの生活や産業において欠かせない存在です。モータには多くの種類がありますが、駆動電源の種類で分類すると「DC(直流)モータ」と「AC(交流)モータ」に分類できます。ACモータは長寿命が求められる産業機械やロボットなどに、DCモータは静音性やコストが重視される民生機器に多く使用されています。
1-1. モータの基本構造
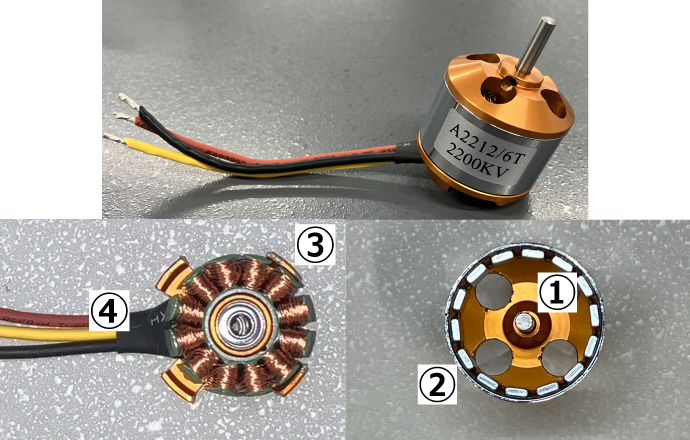
右図はブラシレスモータ(アウターロータ型)を分解したときの写真です。主に「①シャフト(モータ軸)➁ロータ(回転子)③ステータ(固定子)④リード線」で構成されており、基本的にモータはこれらの要素で構成されています。
シャフトはモータの回転軸であり、それを囲むように回転部のロータとそれを支えるステータがあります。リード線は電源やセンサ、駆動回路に接続されています。
アウターロータ型のモータでは、内側にコイル、外側に磁石が配置されており、3本のリード線で各相(U相、V相、W相)を制御することで、モータを回転させます。
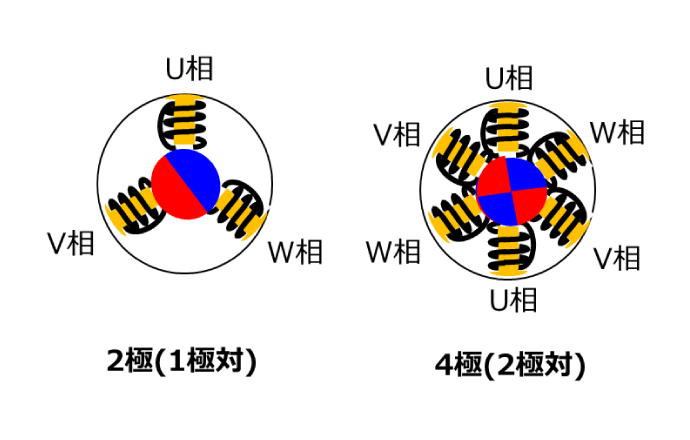
モータの回転数や周波数との関係に影響を与える重要な要素に極数があります。極数はモータ内のN極とS極の合計数で、極数が多いほど精密な制御が可能になる一方、コストは高くなる傾向にあります。極対数はN極とS極のセット数で、極数を2で割った値です。
回転数[rpm]は「60 × 電源周波数[Hz]÷ 極対数」で求めることが可能です。たとえば、極対数が2で電源周波数が60Hzの場合、回転数は「60 × 60 ÷ 2 = 1800[rpm] 」になります。
このように、モータの回転数は周波数に比例し、極数(正確には極対数)に反比例します。 なお、rpmとは "revolutions per minute" の略で、1分間あたりの回転数を表します。
1-2. モータの出力や損失
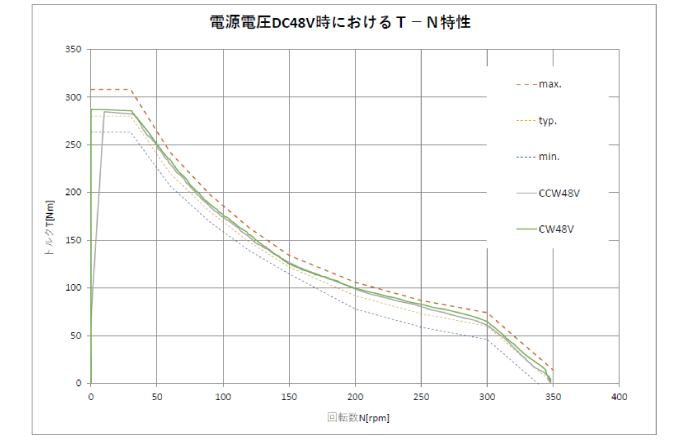
次は出力特性について説明します。この情報はモータの初期検討時や最終評価時に必要で、初期検討では目的の製品に必要なトルクと回転数を基にモータを選定し、評価時には指定した回転数と実際のトルクを比較し確認するために使用します。トルク測定にはパワーメーターを使用し、特性表との一致を確認します。
また、製品に必要なトルクと回転数からモータの出力[W]を「トルク[Nm]× 2π × 回転数[rpm]÷ 60」で求めることが可能です。たとえば、トルク100Nmで回転数200rpmの場合、「100 × 2π × 200 ÷ 60 = 約2094[W]」となります。
トルクとは、回転軸周りの力(モーメント)を意味し、モータの回転力そのものです。また、回転数はrpmだけでなく、rad/sで表すこともあります。
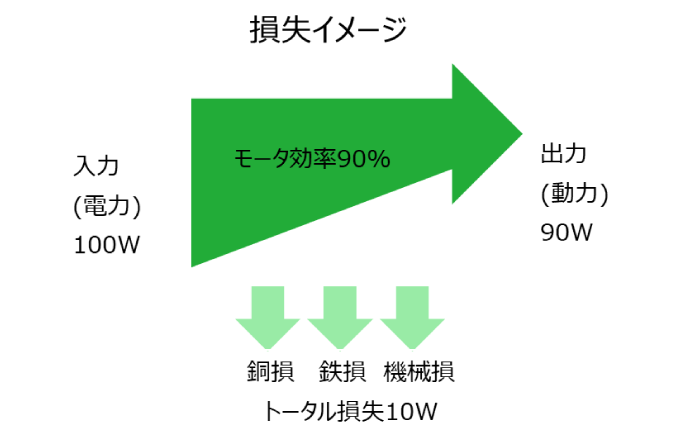
モータ選定では、モータの効率も重要な指標になります。モータの効率とは、入力電力[W]に対する出力[W]の割合のことを指します。理想は効率[%]が100%になることですが、実際には電気抵抗や摩擦のため、一部の電力は熱に変換され、捨てられます。損失とは、この熱のことを指します。
これらの関係性から損失[W]は「入力電力 ー 出力」、効率[%]は「(出力÷入力電力)× 100」で算出できます。左記では、入力が100Wで出力時に90Wとなっており、10Wの損失が発生しているため、モータの効率は90%になります。
モータの損失には銅損や鉄損、機械損など、複数の要因がありますが、効率の低いモータは運用コストが大きくなることはもちろん、発熱量が大きく対策のためにモータ自体が大型になることも多いです。
2. モータを制御するには
先程までの説明で、モータの構造や基礎についてはある程度理解して頂けたかと思います。ここでは、例としてブラシレスDCモータの制御方法について解説します。
2-1. 駆動回路について
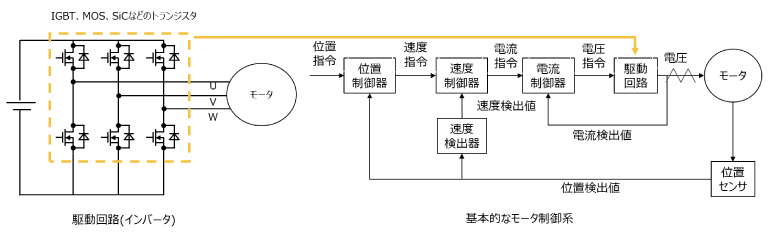
ブラシレスDCモータでは、回転速度は印加電圧、負荷トルクの関係で決まり、モータに与える電圧を変えることで回転速度を制御できます。下記に基本的なモータのブロックを記載しています。一般的な説明として位置センサの情報からモータ位置を検出し、速度検出器にて速度を検出します。その後、速度指令値と検出値を速度制御器で比較して、電流指令値を出力します。次に抵抗を介して検出した電流値と電流指令値を比較して電圧指令を駆動回路に出力します。この駆動回路はインバータと呼ばれており、ここで電圧や電流を調節し、モータに出力することで速度制御を行います。
2-2. マイコンから制御する方法
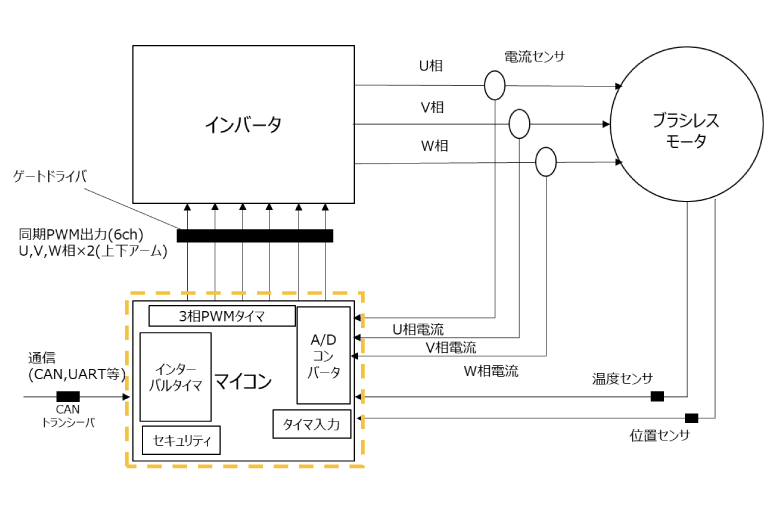
今回はマイコンを使ってベクトル制御でモータを回転させますので、マイコンで制御する方法について説明させて頂きます。まず、モータ制御に必要なマイコンの機能ですが、時間測定用にインターバルタイマ機能、インバータへの3相PWMタイマ出力、位置センサ測定用にタイマ入力、電流や温度測定用にADコンバータが必要になります。他にも上位IFからの指令でモータを制御するために、CANやUARTなどの通信機能が必要になります。また必須ではないのですが、近年ではセキュリティ要求も増えてきており、マイコンにセキュリティ機能が内蔵されているかもひとつのポイントになります。
■モータ開発の課題を解決
-
インバータ制御方式についてはこちらの記事で解説しています。
-

【記事】省エネ、高効率を実現するブラシレスモータの開発課題と解決策

3. モータの制御を実演
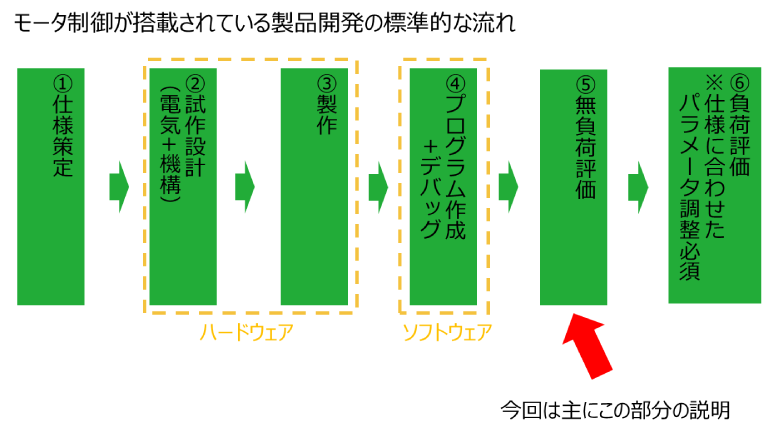
デモを実施する前に、モータ制御搭載製品の標準的な開発工程の流れをご説明をさせて頂きます。製品開発では「仕様策定 ~ ハードウェアの設計、製作」を行い、ソフトウェアを組み込んでのデバッグ、その後、無負荷での評価負荷評価を行います。ここで言う負荷評価とは"制御対象物"をつけての評価のことです。アプリケーションが送風機の場合、モータに回転するハネをつけた状態で評価を実施することです。今回は、負荷なしのモータ単体で動かす無負荷評価で動作を行います。
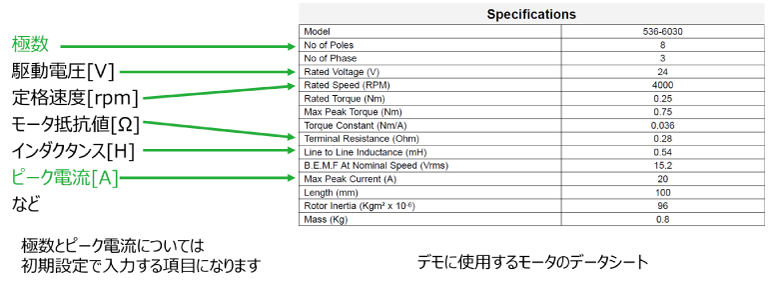
モータを動作させるために必要な情報は、下記のようにデータシートに記載されています。今回使用するツールでも、初期設定時に極対数と定格電流の入力が必要です。またモータを実際に動作させる際には、定格などが守られていることを確認したうえで、このような情報をソフトウェアに組み込む必要があります。
3-1. デモ環境の説明
デモを行うためには、事前に以下の準備物が必要です。評価ボードやツールに関して不明点がございましたらお問い合わせください。
デモの準備物

- ハードウェア関連
- ① 評価ボード(RX24T搭載評価ボード)
- ➁ E2エミュレータLite(ソフト書き込み用)
- ソフトウェア関連
- ③ モータ評価ツール(Renesas Motor Workbench)
- ④ 書き込みツール(Renesas Flash Programmer)
- ⑤ 統合開発環境(CS+)
- ⑥ 動作確認用サンプルソフト
- 評価関連+その他
- ⑦ ブラシレスモータ
- ⑧ オシロスコープ
- ⑨ 電流プローブ
- ⑩ PC
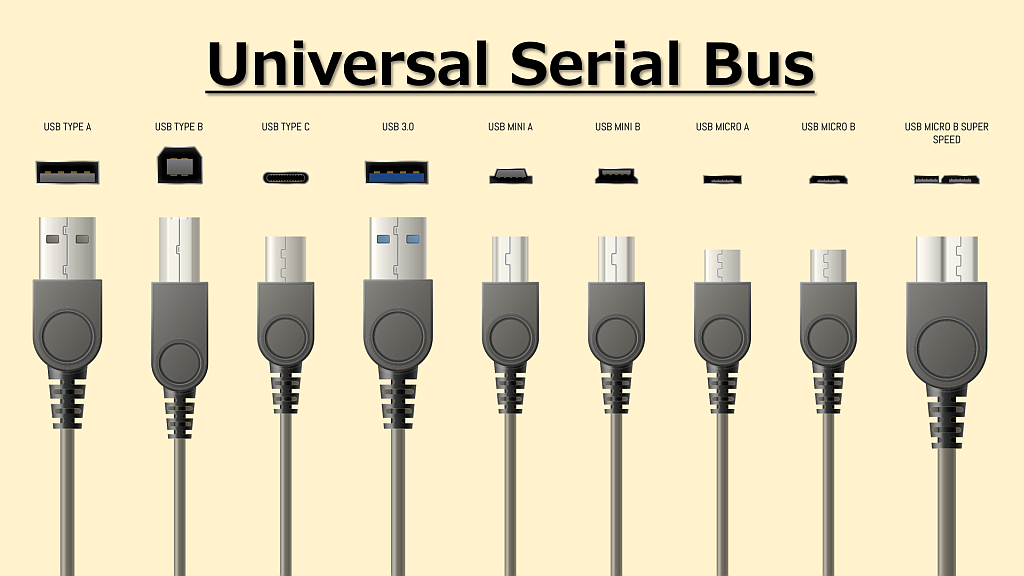
- ⑪ USB miniBケーブル
- ⑫ 電源(24V)
3-2. オートチューニングとモータの動作確認
モータ制御では、プログラムを急に停止するとPWM出力により大電流が流れ、インバータボードが破損する恐れがあるため、通常のようにブレークポイントを使ってマイコン内部の変数を確認できません。
そのため、プログラムを実行しながら安全にデバッグを行う方法が必要です。全体の流れは大まかに記載しておりますが、ボリュームが大きくなるため詳細は別途資料をご参照ください。
全体手順
- ① 評価ボードにオートチューニング用ソフトウェアを書き込む
- ➁ 評価ボードと機材を接続し、電源を供給する
- ③ RMWツールの設定とオートチューニングを実行する
- ④ 抽出されたパラメータが出力されるため、動作確認用サンプルソフトに反映する
- ⑤ モータを動作させる
\\ モータはどのように制御する? //


4. まとめ
本記事では、モータの基礎知識や制御方式に加え、評価ボードを使用して実際にモータを駆動させるまでの手順について解説いたしました。モータを使用した製品開発においてお困りのことやご不明点などがございましたら、どうぞお気軽にご相談ください。
(執筆者:深田 新、編集者:古澤 禎崇)