SDV時代の車載ネットワーク・前編 ゾーンアーキテクチャとEthernet
........
- 更新日
- 2025.04.28
- 公開日
- 2025.03.24

現在、自動車の開発はハードウェア主導型からソフトウェア主導型、すなわち「ソフトウェア定義車両(Software Defined Vehicle:SDV)」の時代へと大きく変革しています。
本記事では車載ネットワーク規格の種類から、ゾーンアーキテクチャ化による車載ネットワークの変化について、詳しく解説いたします。
SDVの普及が進む背景やメリットについて解説している記事もございます。気になる方はこちらをクリック!
1. 車載ネットワーク規格とは?主要通信技術と特徴を解説
自動車には多数の電子制御ユニット(ECU)が搭載され、各ECUが連携して車両全体の制御を実現しています。そのため、ECU間の通信は安全性や快適性の向上において極めて重要な役割を担っており、用途に応じてさまざまな通信規格が採用されています。
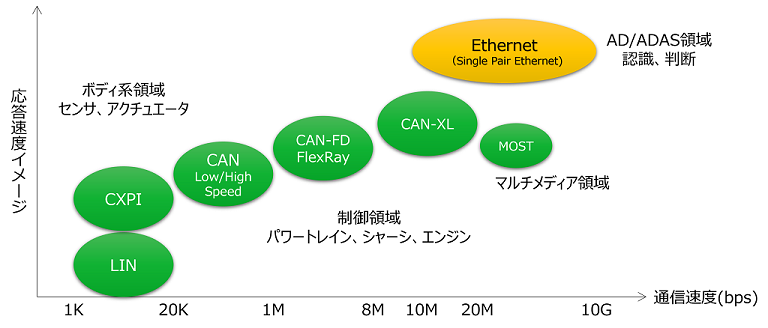
車載ネットワーク規格
【CAN(Controller Area Network)】
・最も一般的な車載ネットワーク規格
・エンジン制御、ブレーキ制御、エアバッグ制御など、安全に関わる重要システムで利用される
【LIN(Local Interconnect Network)】
・CANよりも低速かつ低コストな通信規格
・パワーウィンドウ、ドアロック、エアコン制御など、比較的単純な機能の通信に適している
【FlexRay】
・高速通信と耐障害性に優れた規格
・ステアリング制御やブレーキ制御など、高い信頼性が求められる分野で採用される
【MOST】
・オーディオ、ビデオ、データ信号を高品質かつ高速に伝送するための通信規格
・車載インフォテインメントシステムの効率的なデータ転送が可能
【Ethernet】
・近年、車載ネットワークの高速化・大容量化に伴い導入が進んでいる規格
・インフォテインメントシステムや先進運転支援システム(ADAS)など、大量のデータを扱うシステムで利用される
これらの規格を適切に選択・組み合わせることで、安全で快適な自動車の実現が可能となります。
近年の自動車の高度化に伴い、車載ネットワーク上のデータ通信量は急増しています。このような背景から、より高速で大容量のデータ伝送を実現する通信手段として、Ethernet(イーサネット)の採用が注目されています。
Ethernetはオープンな規格であり、既存のネットワーク技術との互換性や拡張性が高いことが特徴で、Time-Sensitive Networking(TSN)などの技術を活用することで、リアルタイム性や信頼性も向上させることが可能です。

2. ゾーンアーキテクチャ化のメリット・デメリット
従来の自動車の電子システム設計は、電装システムを車両全体で一元的に管理する集中型のドメインアーキテクチャが主流でした。しかし近年の電子システム設計は、より効率的かつ柔軟性の高いゾーンアーキテクチャへと進化しようとしています。このアーキテクチャの変化のことを「ゾーンアーキテクチャ化」と呼んでいます。
ドメインアーキテクチャとゾーンアーキテクチャ比較
従来のドメインアーキテクチャでは、車両全体を機能別に分割し、各ドメインごとにECUが配置されていました。一方、ゾーンアーキテクチャは、車両を物理的なエリア(ゾーン)ごとに分割し、それぞれのゾーンにECUを配置する構成となります。
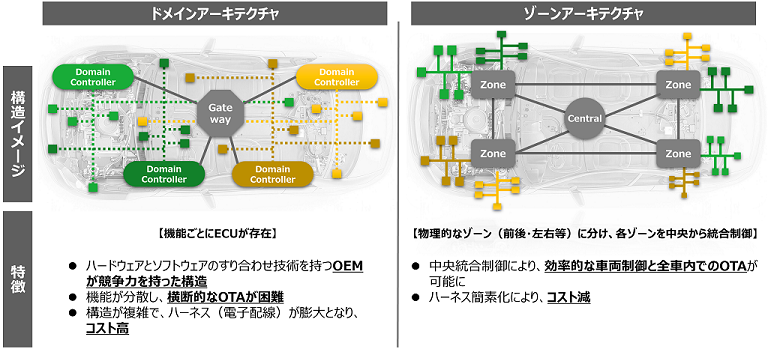
○ゾーンアーキテクチャのメリット
1. 配線の簡素化と軽量化
各ゾーン内で短いケーブルでデバイスを接続できるため、従来のドメイン方式で必要だった長大なワイヤハーネスが不要となります。
2. 柔軟なシステム構成
ゾーンごとに独立した制御ユニットを配置することで、各ゾーンの機能を集中管理することが可能になります。結果的に、中央コンピューティングユニットとの連携で全体最適化が実現できます。
3. 将来的なアップデート・拡張性
モジュール化された構造により、システムの再設計やソフトウェアのアップデートが容易となり、OTAなどの遠隔更新機能と相まって、ライフタイムにわたる柔軟な機能追加が可能となります。
○ゾーンアーキテクチャのデメリット
ドメインからゾーンへの移行はアーキテクチャの考え方が変わる為、システム全体の再設計やソフトウェアの再構築、さらには新たなハーネス設計など、多大な労力と時間を要します。また、ECU間のEthernet化が不可欠となります。
クロスオーバーアーキテクチャ
ゾーンアーキテクチャのデメリットにもあるように完全なゾーンアーキテクチャへの移行は、多大な労力と時間を要するため、多くの自動車メーカではクロスオーバーアーキテクチャという段階的な移行戦略が採用されています。
このアプローチでは、従来のドメイン構成の利点を保持しつつ、ゾーンアーキテクチャの配線簡素化や柔軟性のメリットを部分的に取り入れることで、スムーズな移行を実現できると考えられます。
3.ゾーンアーキテクチャ化による車載ネットワークの変化
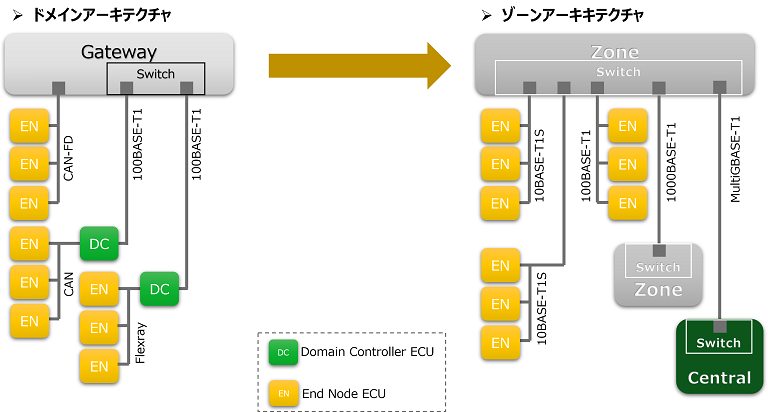
ドメインアーキテクチャでは、車両内の各エンドノード(CAN、CAN-FD、FlexRayなどを用いる低速センサやアクチュエータ)がドメインコントローラに接続され、各機能ブロックごとにネットワークが分割されています。一方、ゾーンアーキテクチャでは、車両を複数の「ゾーン」に分割し、各ゾーン内のECU(ゾーンECU)がそのゾーンに属するエンドノードと直接通信します。
これにより、従来のドメインコントローラを介する複雑なバス型構成が解消され10BASE-T1SなどのEthernetベースの物理層技術が導入されることで、局所的な通信が実現されます。結果、システム全体のスケーラビリティ、信頼性、保守性が向上し、従来の低速プロトコルに依存した通信方式が根本的に刷新されると期待されます。
4.まとめ
従来は車載用のネットワークとして、「CAN」や「LIN」等がそれぞれ用途ごとに使用されていましたが、今後ゾーンアーキテクチャとEthernet技術の発展により、自動車の電子システムはより高度化・効率化していくと考えられます。ゾーンアーキテクチャ化に伴い高速大容量通信が必要となることで、データ転送速度が非常に速く、マルチドロップ接続も可能な「Ethernet通信」での統一化が進んでいくと考えられます。
次回の記事では、10BASE-T1Sの概要からシステム構成まで詳しく解説していきます。
車載セキュリティや、10BASE-T1Sの概要について知りたい方はこちらの記事もご覧ください。


(執筆者:馬場 貴之、編集者:安西 滉樹)